AIというと、「1つの頭脳がデータを分析して答えを出すもの」というイメージが強いかもしれません。
一方で、現実の社会は「たくさんのプレイヤーが同時に動き、お互いに影響し合う世界」です。
- たくさんの車が走る道路
- 無数の倉庫ロボットが動き回る物流センター
- 電気を売り買いする家庭・工場・電力会社
- 多くの担当者やシステムが関わる企業の業務
こうした「チーム戦」のような世界を最適化するためのAIが、チームプレー型AIです。
チームプレー型AI =「お互いを気にしながらチームとして行動できるAI(エージェント)群」と考えると分かりやすいです。ポイントは1人1人が勝手に動くのではなく、全体としての成果(売上・効率・安全・省エネなど)を最大化するように学ぶところが特徴です。
身近なたとえでイメージするチームプレー型AI
サッカーの例え
- 普通のAI:「シュートだけすごく上手いストライカー」を育てるイメージ
- チームプレー型AI:11人それぞれが役割を持ち、味方や相手の動きを見ながら、チームとして点を取り、失点を減らすことができるエージェント群
誰か1人だけが頑張っても勝てません。
「パスを出す」「守りに回る」「自分は囮で走る」など、全体の勝利のために動き方を変えていく、それがチームプレー型AIです。
オーケストラの例え
- 指揮者:目的やルールを決める側(人間・システム)
- 各楽器の奏者:エージェント(ロボット・車・ソフトウェアなど)
楽譜(ルール)を元にしながら、周りの音(状態)を聞き、全体として気持ちのよいハーモニーになるように調整する。
これもチームプレー型AIの典型的なイメージです。
実際のユースケース例
① 物流倉庫:ロボットたちの「交通整理」
物流倉庫の完全自動化には、数百〜数千台のロボットを渋滞や衝突を避けて協調的に制御させ、出荷時間に間に合うように各ロボットの最適なルートを求めたいです。
チームプレー型AIがすることは以下の二点です。
- 各ロボットが、周囲のロボット・棚の位置・締切などを見ながら
「今どのルートを通るのがチーム全体として最も効率が良いか」を学習 - 誰か1台だけが最短ルートを通るのではなく、
全体の渋滞を減らし、トータルの処理量を最大化するように動く
②オフィス業務:人とAIがチームで働く
社内DXを行っても、営業・カスタマーサポート・経理・物流など、部署ごとに最適化すると全体としては非効率になることが多いです。
チームプレー型AIは営業の予定、在庫状況、配送能力、経理の締め日などを踏まえ、会社全体の売上・利益・顧客満足が最大になるようにタスクや優先度を調整
結果として、
- 「この案件は急いで対応すべき」
- 「この顧客は今週中にフォローすべき」
- 「この時間帯に倉庫人員を増やすべき」
などを、チームとして判断するAIが実現できます。
③エネルギー:電気を「譲り合う」スマートな街
太陽光発電やEV(電気自動車)の普及で、電気の需要と供給が時間帯ごとに大きく変動しているがゆえに、ピーク時の電力ひっ迫や、再エネのムダが問題になっています。チームプレー型AIは、「家庭」「EV」「バッテリー」「工場」などを一つ一つがエージェントとして扱い、それぞれが「いつ充電するか」「いつ使うか」「いつ売るか」を調整して街全体での電力コスト・CO₂排出・負荷のピークを下げるように学習します。
結果として、
- 電気代の削減
- 停電リスクの低減
- 再エネの有効活用
など、社会全体でのメリットが生まれます。
技術的な観点から見たチームプレー型AI(理系向け)
チームプレー型AIの抽象化
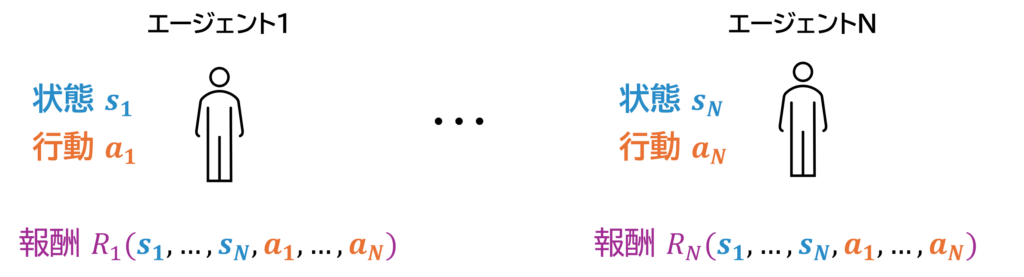
エージェントが複数いるマルチエージェント環境を抽象化すると以下のようになります。
- 各エージェントは自分の置かれた状態をもとに行動を決定し、報酬を受け取る。
- 報酬は全エージェントの状態と行動の関数である
- 各エージェントの目的は報酬の最大化である
このとき、各エージェントが自分の報酬を最大化する上で次のような難しさがあります
- 各エージェントは他のエージェントの状態について知らない場合がある
- 倉庫ロボットの場合:あるロボットは、自分の近くにいるロボットはセンサーで見えますが少し離れた通路で「渋滞しているロボットの列」までは見えないかもしれません。結果として、「この通路は空いていそうだ」と判断して曲がった先で渋滞にハマり、本来もっと良いルートがあったのに、情報不足のせいで最適な行動が取れないことが起こりえます。
- 複数ロボットでの災害現場探索の場合:地震後の建物内を複数の探索ロボットが捜索するケースを考えます。各ロボットは、自分のカメラやセンサーで周囲数メートルの瓦礫・被災者の有無は分かります。しかし、通信が途切れがちな環境では、「他のロボットがすでにどのルートを通って、どこまで到達しているか」という状態は共有できないことがあります。その結果、お互いが似たルートを重複して探索してしまい、探索されていないエリアが残るといった問題が出ます。
- 各エージェントは他のエージェントのどう行動するかを前もって知らない場合がある
- 自動運転車同士の合流の場合
- 高速道路の合流ポイントで、自動運転車 A は「隣のレーンの車 B が減速して譲ってくれるのか、逆に加速して先に行こうとするのか」を知りません。
- それでも A は、B の行動をある程度予測しながら自分が加速すべきか減速すべきかを決める必要があります。
- 電力の需要応答(デマンドレスポンス)の場合
- 複数の工場やビルが、「ピーク時に電力使用量をどれくらい抑えるか」を自動で決めるような状況を考えます。
- ある工場のエージェントは、「他の工場やビルがどの程度節電するのか」を事前には知りません。
- 「みんなが思ったより節電した結果、電力価格が想定より下がる」こともあれば、「あまり節電せず価格が高騰する」こともあります。
- 自分が今どこまで節電するかを決めるとき、他社がどう節電するかという不確実性を抱えています。
- 複数の工場やビルが、「ピーク時に電力使用量をどれくらい抑えるか」を自動で決めるような状況を考えます。
- 自動運転車同士の合流の場合
- 各エージェントは他のエージェントの報酬関数について知らない場合がある
- 交通の例:「時間短縮」を優先するドライバーとB「安全・快適さ」を最重視するドライバーのどちらが周囲を走っているのかを知りません。そのため、「この車は強気に割り込んでくるタイプか、きちんと譲ってくれるタイプか」を実際の挙動から推測しながら対応しなければなりません。
- 各エージェントは自分の報酬関数すらも知らない場合がある
- 都市の交通信号制御の場合
- 大都市で、複数の信号機をAIで制御して渋滞や環境負荷を減らすことを考えます。
- 考えなければいけないことは
- 車の平均移動時間
- バスや救急車など、公共性の高い車の優先度
- 歩行者や自転車の安全性と待ち時間
- CO₂排出量や騒音
- 住宅地と幹線道路での“迷惑の分布”
- これらを全部ひっくるめて「完璧な報酬関数」を最初から設計するのは、ほぼ不可能です。ある地区では「渋滞より安全が最重要」
別の地区では「多少うるさくても物流を止めない方が優先」など、地域によって価値観も違います。 - この交通制御エージェント群は、「何をどれくらい我慢してもらい、何を優先するのが“この街にとっての幸せか”?」を最初から厳密には知らず、シミュレーションや実証実験を通じてデータを集め、事故やクレーム、満足度などのフィードバックを観測しながら、その街固有の報酬関数を学んでいく必要があります。
- 都市の交通信号制御の場合
シミュレーションと世界モデル
チームプレー型AIの導入を検討する場合、現実世界でいきなり学習させるのは危険・高コストなので、
- 倉庫内シミュレータ
- 電力ネットワークシミュレータ
- 交通シミュレータ
などのシミュレーション環境(≒仮想空間)を用意して学習させます。
さらに最近は、
- 環境の動きをAI自身が学習して再現する 「世界モデル」
を使い、シミュレーションそのものをAIが内包するような形で効率的に学習する研究も進んでいます。
チームプレー型AIのメリットと難しさ
メリット
- 全体最適が狙える
部署ごとの最適化・ロボット1台ごとの最適化ではなく、
「システム全体の目的」に合わせて調整できる。 - スケーラブル
エージェントを追加することで、大規模なシステム(数百〜数万単位)にも対応可能。 - 変化に強い
需要の変動や障害など、環境の変化に応じて振る舞いを更新していける。
難しさ
- 学習が複雑
他のエージェントも同時に学習しているため、「相手が変化する中での学習」となる。 - 評価が難しい
あるエージェントの行動が、どの程度全体の結果に貢献したかを切り分けるのが難しい。 - 安全性・説明責任
多数のエージェントが連携して動くため、「なぜそうなったか」を人間に説明する工夫も必要。
よくある質問(FAQ)
Q1. 普通のAI(機械学習や単一の強化学習)と何が違うのですか?
A. 一番の違いは、**「前提として、複数の意思決定主体がいるかどうか」**です。
チームプレー型AIは、最初から
- 多数のロボット・車・ユーザ・組織が同時に動く
- 互いに影響し合う
ことを前提にしたAIです。
Q2. どんな企業・組織に向いていますか?
A. 特に、次のような領域と相性が良いです。
- 社内の複数部署・複数システムが絡む、複雑な業務プロセスの最適化
- 物流・倉庫・製造ラインなど、多くの機械が動き回る現場
- エネルギー・モビリティなど、多くのプレイヤーが電力・移動をシェアする分野
チームプレー型AIの可能性
我々は将来的にチームプレー型AIを搭載したロボットが物理世界で多くの仕事をこなすと考えています。
チームプレー型AIは今後さまざまな業界でますますその重要性が増してくるでしょう。これを読んでくださっている皆様の中に、自分の業界でどのようにチームプレー型AIが威力を発揮するかを知りたい方はお気軽にご連絡ください。